In architecture, kinetic responsive facades (KRFs) are increasingly popular due to their ability to create dynamic building designs and improve energy efficiency and indoor comfort through morphological adaptation. However, despite extensive research and simulations, there are few constructed examples.
In this project, we installed a full-scale kinetic facade model with 13 modules on an experimental house in Yongin, South Korea. By designing and constructing an AI-enabled responsive building facade, we aim to bridge the gap between current knowledge and practice in KRFs, verifying its performance.

Design Development of Hexagonal Kinetic Facade
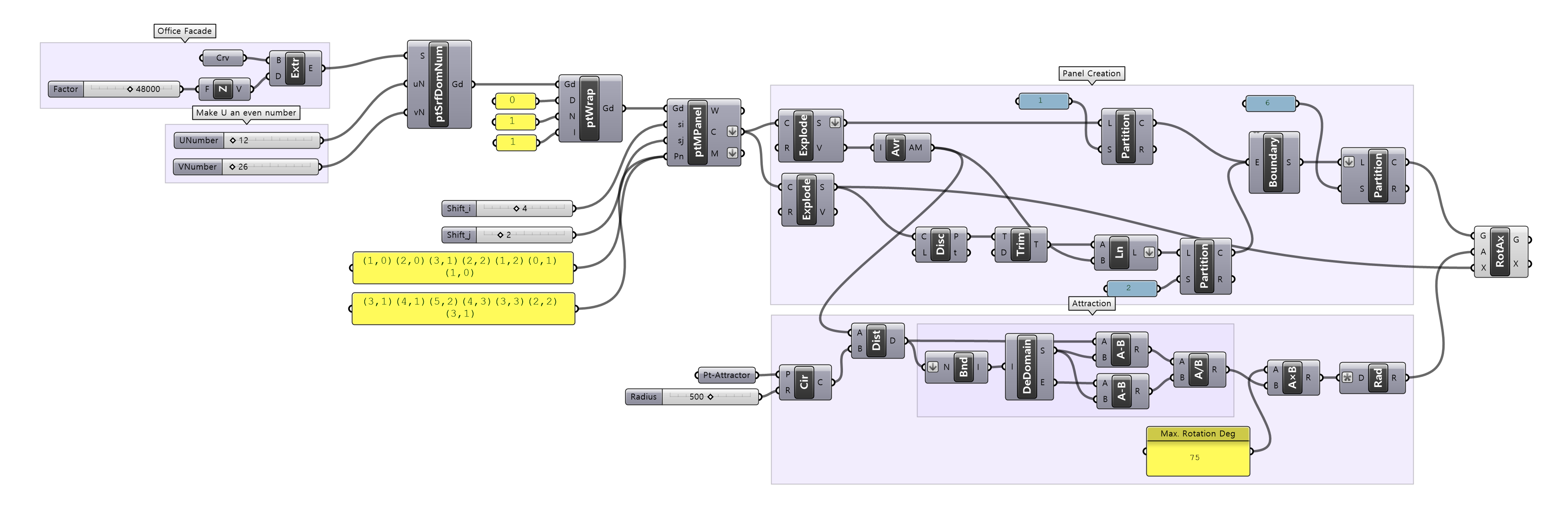
Starting with a hexagonal shape composed of six triangular panels, a regular tessellated foldable surface driven by an electric motor was refined to conceal the motor frame. The Rhino Grasshopper Paneling tool was used to test the parametric elevation design. Gear systems are designed with Fusion 360. The kinetic modules were seamlessly applied to one side of the experimental house’s wall. The opening ratio of the modules continuously changes based on the external reference.
Driving Mechanism and Fabrication
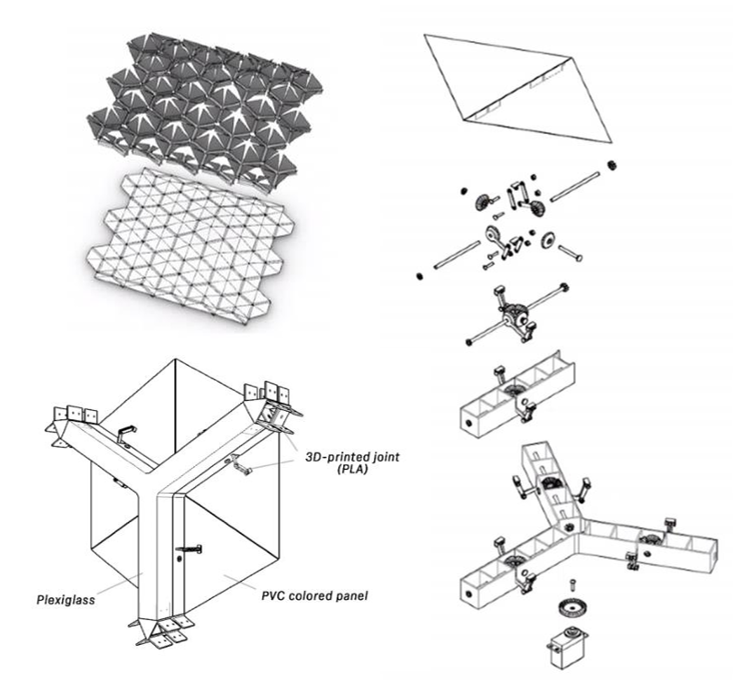
The driving mechanism involves one rack and pinion gear set at the center of the ‘Y’ frame. These gear sets control six triangle panels simultaneously. Additionally, three bevel gearboxes are placed in the middle of each branch, further linked from the center gear.
A double-layered frame made of plexiglass is applied to conceal the electric motors and wires behind the elevation. Furthermore, the panel joints are 3D-printed by using PLA filament.

Lab Project
Young In, South Korea
Project Team
2019-2021
© Mijin Kim All Rights Reserved