The geometrical inflexibility of rigid-body kinetic building facades is disadvantageous in free-form architecture. To address this problem, a gearless, lightweight, and geometrically flexible daylight-adaptive shading facade module is proposed by hybridizing gripper-shaped pneumatic elastomer and shape memory alloy(SMA) actuators. This project presents an advanced architectural application of soft robotics technology and smart material. Detailed information can be found in the published journal “Flexural biomimetic responsive building façade using a hybrid soft robot actuator and fabric membrane” at Automation in Construction, Link.
Bio-mimetic Building Skin System
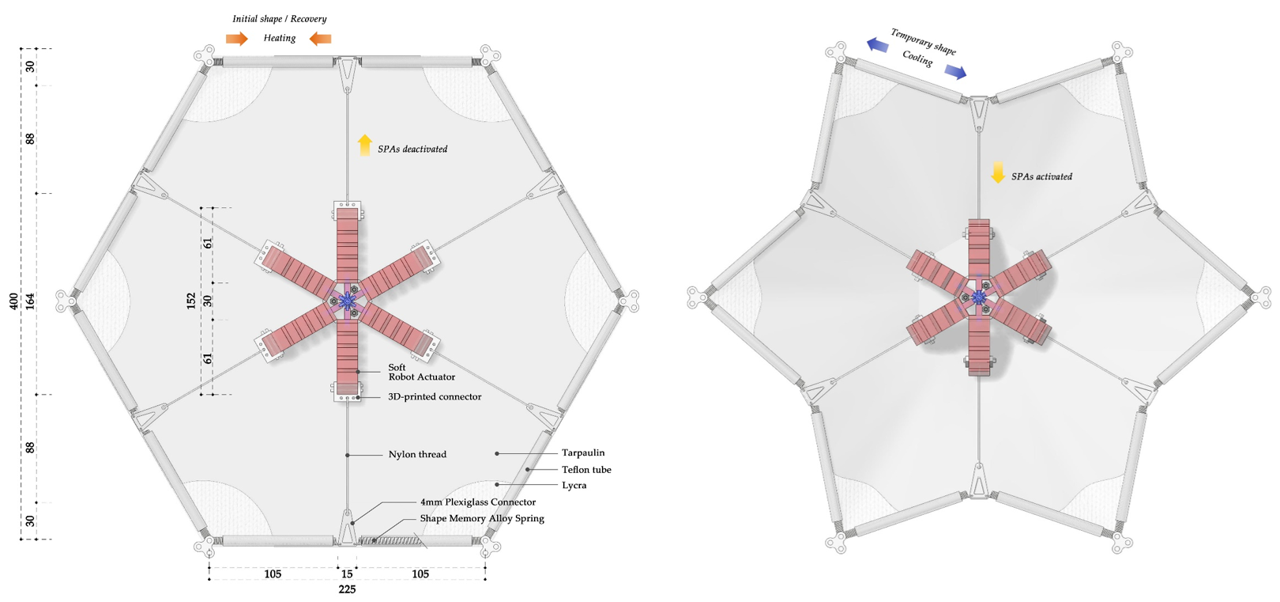
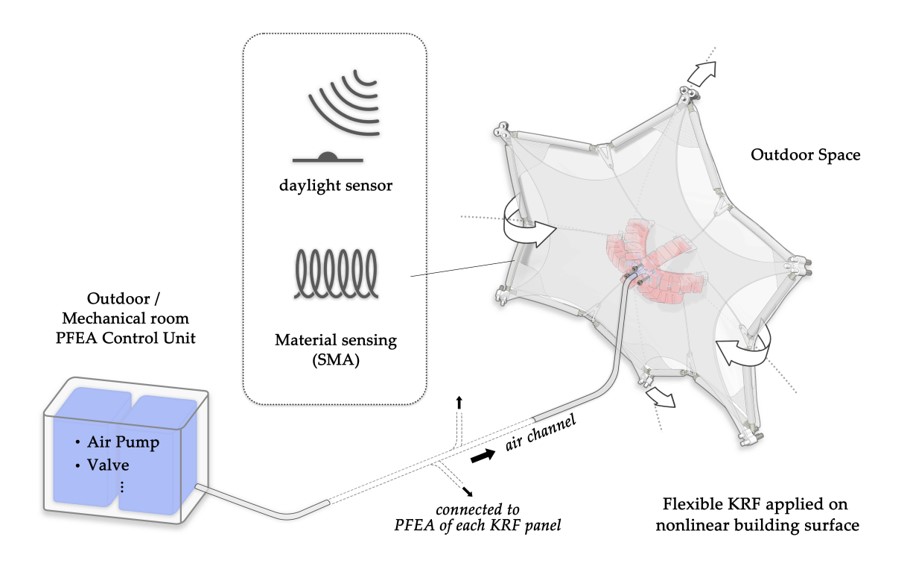
We divide a hypothetical building elevation into a hexagonal honeycomb shape and envision it as a single-panel build module. The design was refined from its initial shape to secure the facade performance from external resistance factors such as wind, reduce the exposure of the actuator, and implement an effective bi-directional opening and closing mechanism through two different soft matters.
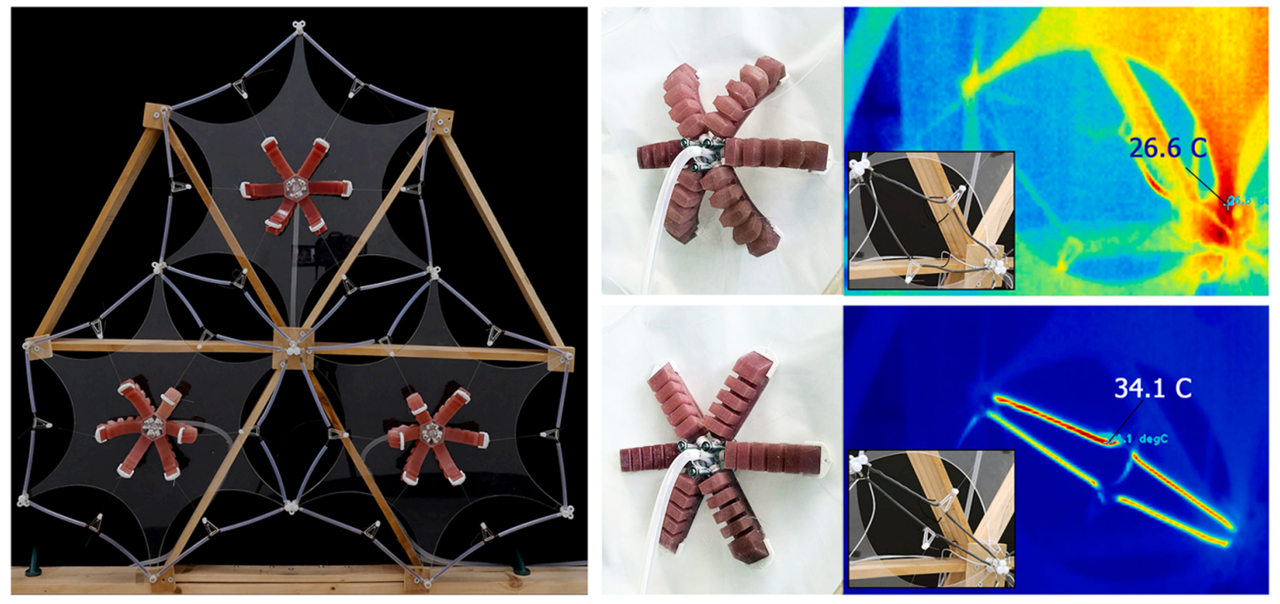
The revised deformation patterns and locations are centered around the corners of the hexagon, opening and closing in the form of the stomata of a cactus-like plant. These opening and closing deformations are created by pneumatic actuators located in the center of the hexagonal panel, pulling the membrane back and forth. SMA wires are inserted into the corners of the membrane, improving restore movement (closing) when the temperature rises.
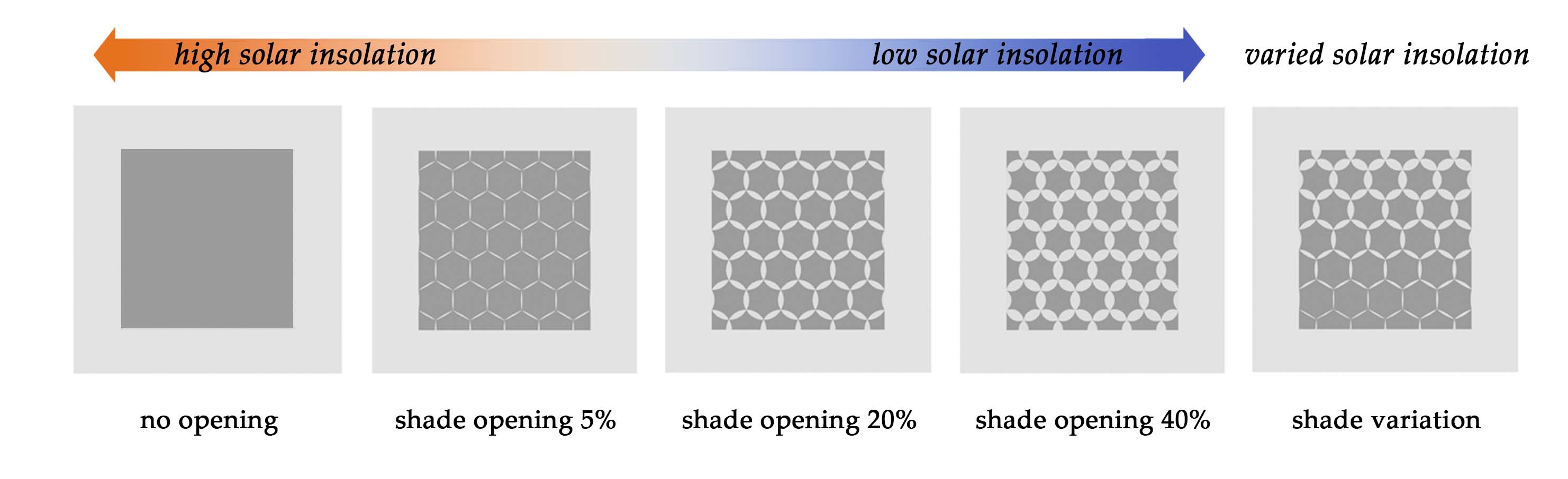
Skin Pattern Design with UDI Analysis
To find a suitable maximum opening area ratio for daylight control, a test office room discretely simulated useful daylight illuminance (UDI) and daylight autonomy (DA) per skin aperture. The upper-range UDI significantly increased over the 20% OA ratio, so we decided on 20% as the maximum OA. (Climate Studio, daylight analysis).

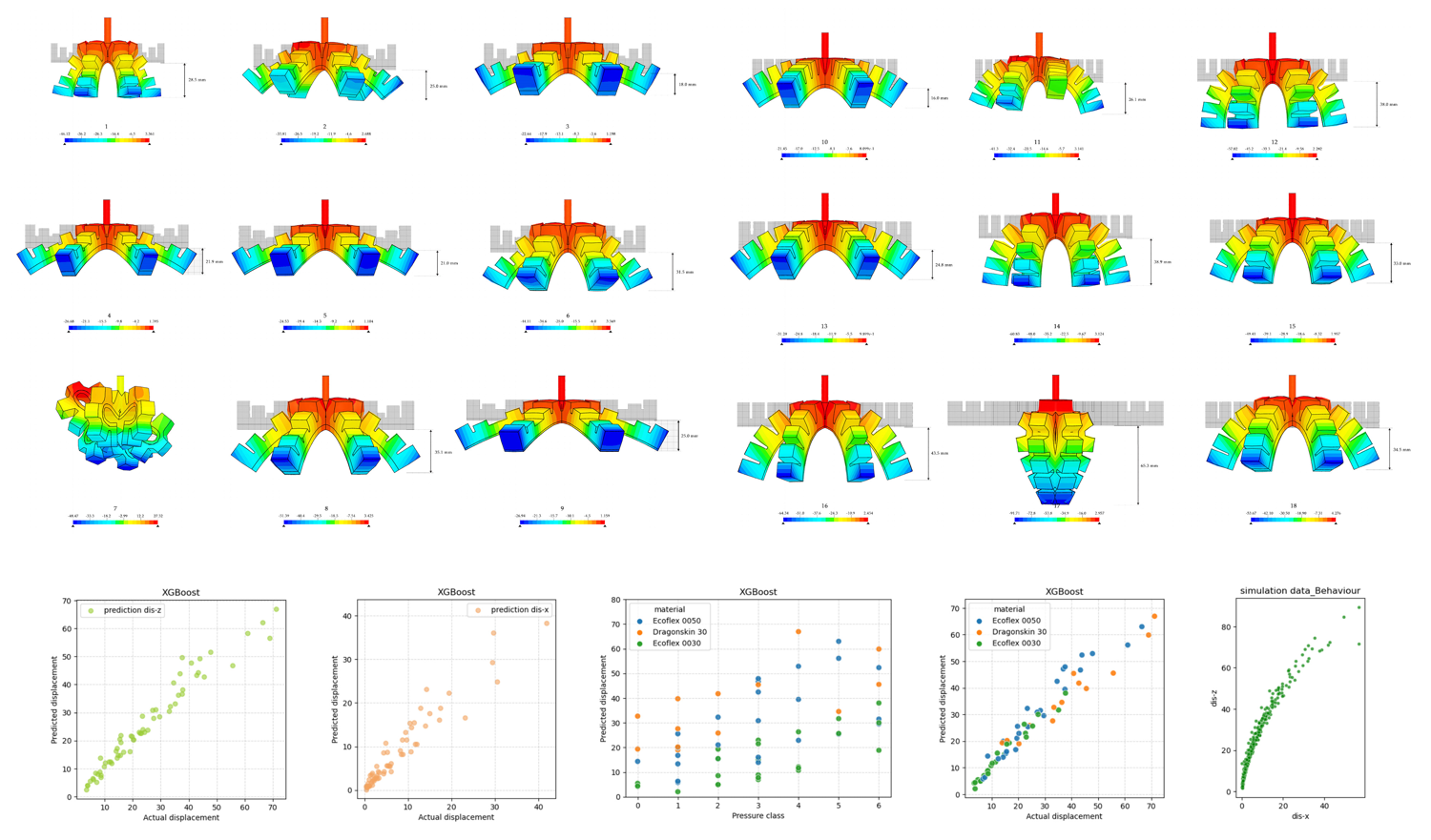
Geometry Design of Soft Actuator
To predict the non-linear behavior of hyper-elastic materials, 18 models were selected through the Taguchi Method with 8 parametric variables. Each model was tested with the combination of 4 materials with different elasticity and 6 different pressure level classifications. The optimized condition that produces the most stable movement was selected. A machine learning-based prediction model was established for better decision-making.
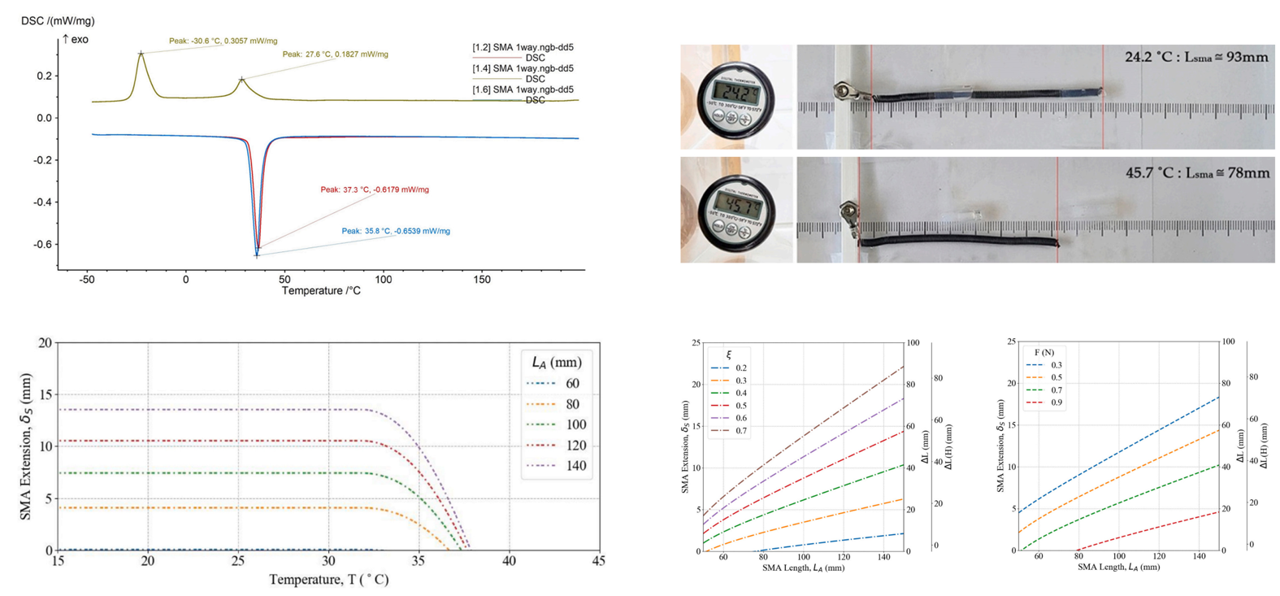
Geometry Design of SMA Actuator
The SMA wire became a form of coil spring to secure an adequate deformation rate, and the diameter of the wire and spring was determined through several quantitative analyses, such as sensitivity analysis, DSC test, and performance simulation. The fabricated SMA starts its actuation at a temperature range between 32˚C and 36˚C.
Hybrid Actuation System
Performance of Flexural Responsive Facade
Research Project
Lead Author
Jan.2021- Dec.2022
© Mijin Kim All Rights Reserved