Despite the growing interest in utilizing industrial robot arms in collaboration with humans for building construction tasks, more studies still need to focus on developing multi-purpose end-effectors. In on-site building work scenarios, tool grasping facilitated by air inflation in soft robot grippers presents an adaptable solution. However, a pneumatic soft gripper is susceptible to tearing and air leakage over prolonged holding periods. To address this challenge, a proposal has been made for an advanced and cost-effective human hand-like soft robot gripper designed for industrial robot arms. We introduced a pre-stressed structure and self-healing material to increase durability over long-term use. The results indicated that pre-stressed finger grippers can securely hold complicated shapes of construction tools without intervention from an external air supply, and the self-healing material aids in restoring the gripper’s initial elasticity.
Research Questions and Gaps
How can soft robot techniques be integrated into the advanced construction process?
Wouldn’t it be possible to build new design of buildings with robots using Flexible Tools?
Related to these research questions, the industrial 6-axis robot arm and several end-effectors for architectural use that are mounted at the end of the robot arm are developed. Driver, spray gun, grippers, 3D printing extruders, CNC or milling tools, and quick change tools are examples. However, despite their continuous commitments, current end-effectors are unsuitable for dynamic and unstructured work environments commonly found in on-site construction. In addition, introduction and maintenance costs are significant because of less interoperability between different end-effector products. The robot arm stops operating whenever a replacement is required, delaying the whole construction process.
But what if we makes human-hand-like end-effectors? They can handle complex tasks by using dexterous finger movement. However, multi-functional robot grippers with rigid-link fingers are susceptible to environmental stressors such as temperature fluctuations, chemicals, dust, moisture, and unexpected impact, which are common in construction site. Moreover, mechanical complexity due to intricate sensor embedding and difficulty in handling fragile or atypical-shaped objects further require robot experts to stay at the site for controlling and pre-programming. Most importantly, there is a risk of human injury from collisions in close distance. Therefore, we need human-hand-shape soft, versatile end-effectors that can easily adapt to undefined conditions without failure or disruption for advanced robotic construction.
Many architectural tasks require holding tools for extended periods, unlike repetitive gripping in other fields. Therefore, prolonged air inflation increases fatigue of the soft robot and leads to malfunction. To address this issue, new proposals that emerged from the soft robotics field were discovered, and two pioneering papers were defined: self-healing materials and pre-stressed reverse mechanisms.
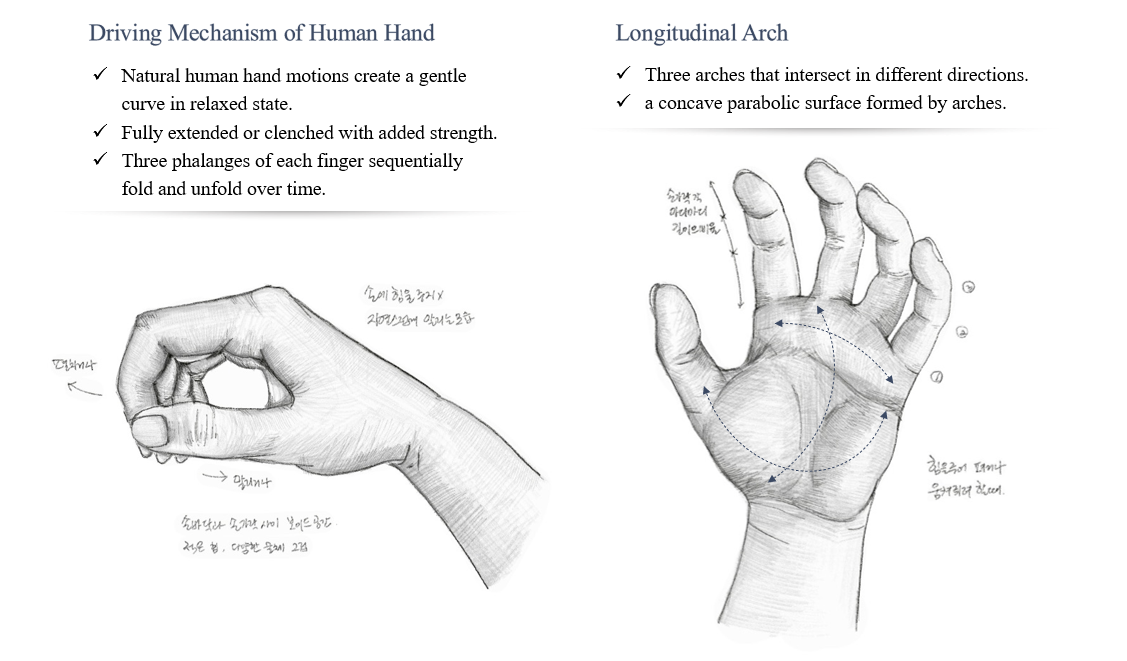
Mimicry of human hand and driving mechanism
Our gripper design evolved around the emulation of the real hand using the pre-stressed driving mechanism for prototyping object grasping performance. Sketches illustrate naturally bent curves and three arches of hand shape.
Iterative Design Modification
Using a multi-layer fabrication approach, we prototyped three geometries of anthropomorphic gripper fingers. The design was refined based on the viscoelastic nature of self-healing material to implement fast shape restoration and appropriate adhesion during the fabrication process. The picture below depicts two initial gripper prototypes.

Actuation of Pneumatic Soft Hand Gripper
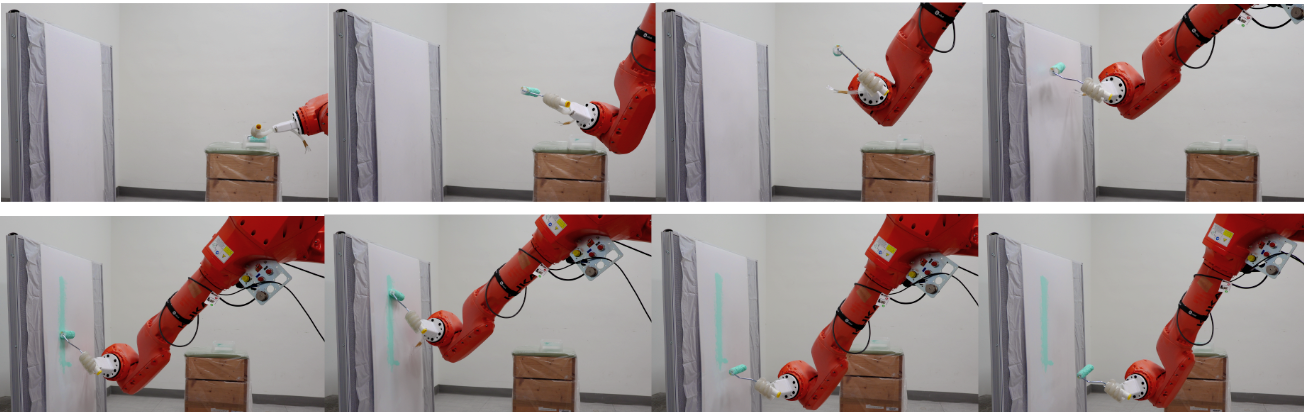
When air is supplied, the finger modules spread while the palm module bends. Each module can be actuated independently, enabling the hand gripper to move dexterously.
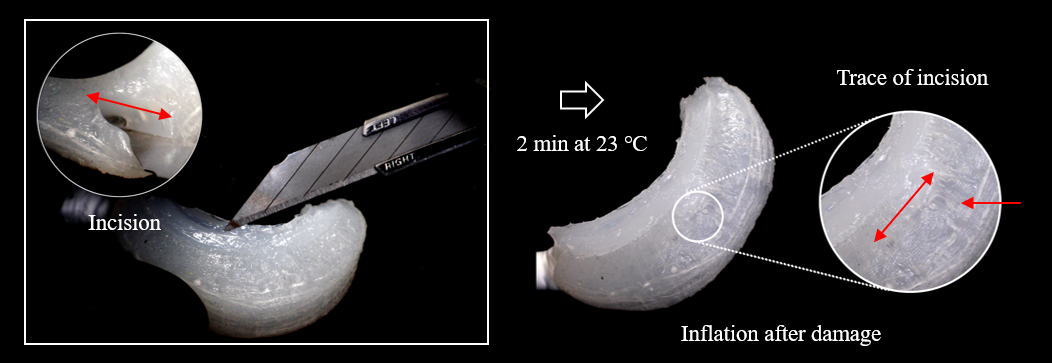
Self-Healability of Finger Gripper
An 8 mm deep, 15 mm wide incision was made on the actuator, fully damaging the internal air chamber. After resting for two minutes at room temperature, the actuator showed substantial recovery, with minimal surface traces of the cut. It also maintained consistent inflation performance, displaying no air leakage after over 20 injection tests.
Zero-power Holding
The key innovation of our end-effectors is introducing a pre-stressed reverse mechanism. This feature significantly reduces the need for an external power supply, allowing for efficient zero-power holding when using a soft hand gripper.

Soft End-effector with Industrial Robot Arm

Research Project
Lead Author
Sep.2023- Feb.2024
© Mijin Kim